Il dispositivo elettromeccanico o la macchina utilizzata per vari scopi e sono controllati e azionati con l'aiuto di tecniche di programmazione è chiamato robot. I robot sono di vari tipi in base alle loro applicazioni come robot industriali , robot militari, robot spaziali, robot domestici, robot ambulanti, robot rampicanti e così via. Il più avanzato progetti di robotica sono in fase di sviluppo per un utilizzo efficace in vari campi per diverse applicazioni. In questo articolo, parliamo di un tipo speciale di progetti di robotica, vale a dire il veicolo robotico che segue la linea con meccanismo di marcia e arrampicata.
Veicolo robotico

Progetti di robotica per studenti di ingegneria
Il veicoli robotici sono particolari tipologie di macchine progettate per muoversi a terra, in aria, sott'acqua e nello spazio in modo autonomo senza essere umano a bordo. Questi veicoli robotici sono controllati e gestiti da vari sensori sistemi di controllo basati. I veicoli robotici sono appositamente progettati per essere utilizzati in condizioni in cui gli esseri umani non sono in grado di entrare come incidenti con incendi, temperature molto alte o molto basse, ecc.,.
Robot inseguitore di linea

Robot inseguitore di linea
Il veicolo robotico che si muove seguendo un percorso o una linea specifica può essere definito come un file robot inseguitore di linea . Questi robot inseguitori di linea sono particolarmente utilizzati in applicazioni industriali per scopi speciali come il trasporto di varie parti o macchinari o veicoli (automobili, biciclette, ecc.) Seguendo la linea specifica da un punto (unità di generazione) a un altro punto (unità di assemblaggio) .
La linea normale che segue un veicolo robotico con caratteristiche speciali come il meccanismo di marcia e salita è una delle interessanti progetti di robotica per studenti di ingegneria , che può essere utilizzato per diverse applicazioni. Di seguito sono illustrati semplici passaggi per progettare un robot inseguitore di linea con meccanismo di camminata e arrampicata.
Passaggio 1: raccolta dei componenti richiesti

Componenti elettrici ed elettronici
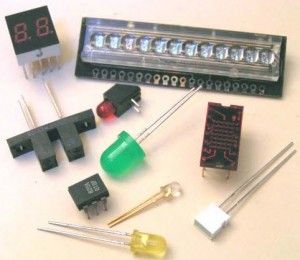
I componenti necessari per la linea di progettazione che segue un veicolo robotico con meccanismo di marcia e salita devono essere stimati in base all'applicazione del robot. Raccogliere tutti i componenti elettrici ed elettronici come resistori, condensatori, trasmettitori IR, motori CC, transistor, corpo robot e fotodiodi con valori nominali appropriati insieme ad altre parti come cartone, bulloni, dadi, strisce di alluminio, ecc., Come da requisito.
Passaggio 2: analisi del circuito per il robot Line Follower

Veicolo robotico che segue la linea, espandibile al diagramma a blocchi del robot che cammina e si arrampica
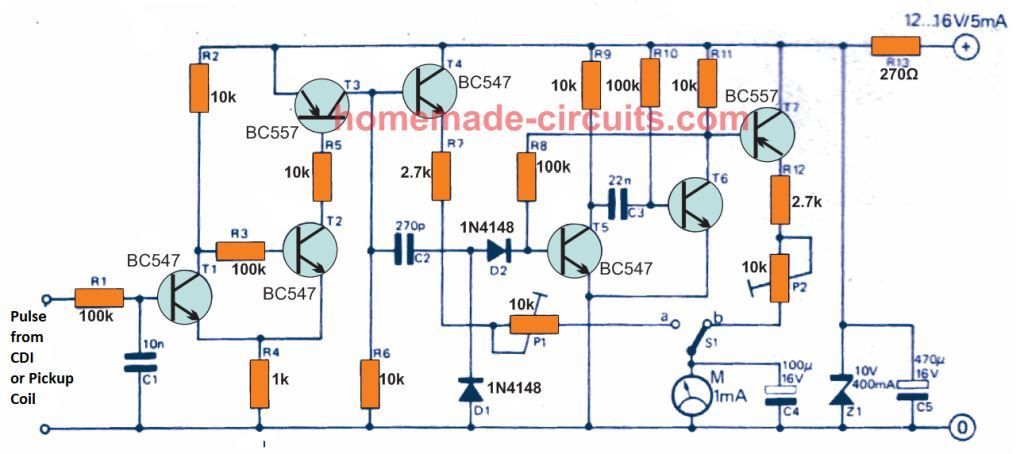
Progettare principalmente uno schema a blocchi di circuiti di progetto con vari blocchi come un file blocco alimentazione , LED IR e blocco fotodiodo e così via. Dopo aver raccolto i componenti, analizzare il progetto del circuito in base al funzionamento dei vari componenti utilizzati. Quindi posizionare i componenti su una breadboard senza saldatura come da schema elettrico utilizzando fili di collegamento per testare il funzionamento del circuito prima di assemblare il circuito sul PCB. Testando il circuito su breadboard senza saldatura se sono necessarie modifiche nel circuito o nelle valutazioni dei componenti, le alternanze possono essere eseguite facilmente senza sprecare denaro e tempo per la sostituzione dei componenti o per alterare il design del circuito.
Fase 3: assemblaggio e saldatura di componenti

Veicolo robotico che segue la linea espandibile al progetto di robot che camminano e si arrampicano
Pertanto, dopo aver analizzato il progetto del circuito, assemblare i componenti secondo lo schema del circuito sul PCB. Quindi, saldare il circuito utilizzando la pistola per saldatura e il filo per saldatura seguendo le linee guida di saldatura appropriate. Collegare correttamente tutte le parti del robot per formare un robot inseguitore di linea come mostrato nell'immagine sopra e incollare le parti del veicolo robotico, se necessario.
Step4: funzionamento del robot inseguitore di linea
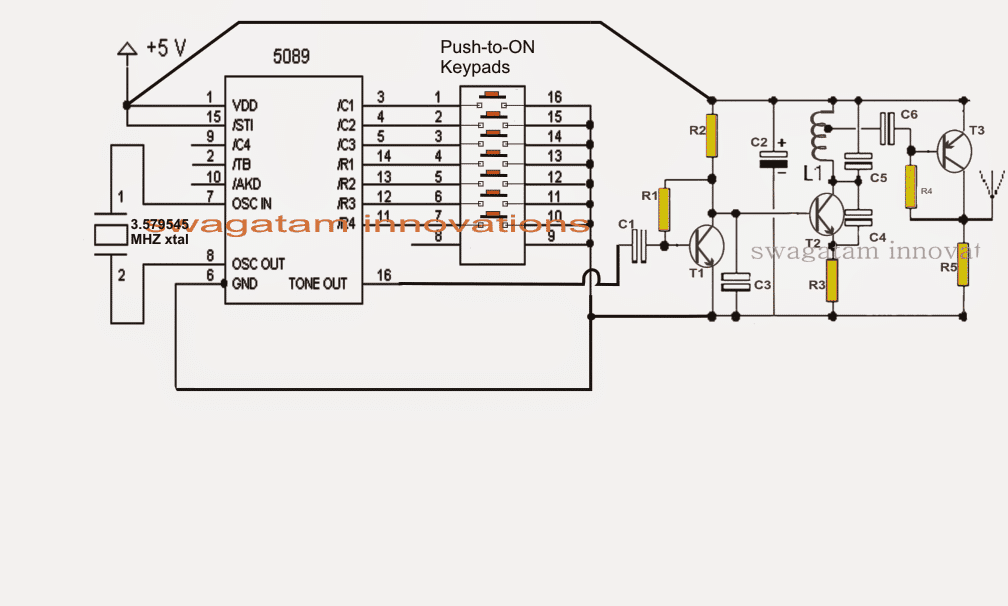
Il trasmettitore IR e il fotodiodo vengono utilizzati come Sensore fotografico coppia che può essere utilizzata per rilevare il percorso specificato per il movimento del robot inseguitore di linea mentre si cammina e si arrampica su pareti. La coppia di fotosensori fornisce segnali appropriati per commutare i transistor per l'azionamento dei motori del robot inseguitore di linea.
Step5: Veicolo robotico con inseguitore di linea con meccanismo di marcia e arrampicata
Ce ne sono numerosi progetti di robotica per studenti di ingegneria in cui il veicolo robotico con inseguitore di linea con meccanismo di marcia e arrampicata è un progetto innovativo e interessante da progettare in proprio utilizzando il nostro eBook gratuito per progettare progetti di elettronica.
Il applicazione della robotica sta rapidamente aumentando nella nostra vita quotidiana per diverse funzioni come applicazioni industriali: spostamento o sollevamento di prodotti pesanti, trasporto all'interno di un'area limitata seguendo percorsi specifici, lavorazione, saldatura, elettrodomestici, robot autonomi, robot militari per la riduzione umana coinvolgimento e pericolo, robot collaborativi per interagire con l'uomo in modo tale da svolgere diversi compiti, robot educativi, robot mobili e umanoidi.
Ti interessa progettare progetti di elettronica per conto proprio? Sai come sviluppare robot umanoidi? Se vuoi saperne di più sui progetti di robotica per studenti di ingegneria, puoi pubblicare domande, commenti, idee e suggerimenti nella sezione commenti qui sotto per qualsiasi aiuto tecnico.