Nel sistemi automobilistici , la complessità elettronica o elettrica sta aumentando. In un veicolo moderno, hanno più di 100 unità di controllo del motore note come ECU. Ogni ECU include una serie di funzioni che devono essere riformulate frequentemente da zero una volta modificato l'hardware come il processore. È molto importante per le automobili rendere indipendente il software applicativo con l'aiuto del suo hardware. Per ottenere ciò, in AUTOSAR vengono eseguite funzioni fondamentali per creare e impostare un'architettura software aperta destinata alle unità di controllo del motore automobilistico. Questo articolo discute una panoramica di un AUTOSAR.
Introduzione ad Autosar
L'AUTOSAR è stato sviluppato da diversi automobile aziende manifatturiere nel 2003 come BMW, Continental AG, Daimler-Benz, Robert Bosch GmbH, Siemens VDO, per aver stabilito un'architettura standard di settore aperta per dispositivi elettrici ed elettronici in un'automobile. Nello stesso anno di novembre, la famosa casa automobilistica come Ford è stata affiancata come Core Partner. Nel mese di dicembre è stata raggiunta la Toyota Motor Corporation & Groupe PSA. Nel febbraio 2008, dopo che la Siemens VDO Company è stata acquisita tramite Continental, ha cessato di essere un Core Partner autonomo per AUTOSAR.
Nel 2003, AUTOSAR ha rilasciato quattro principali architetture software per le industrie automobilistiche. Il lavoro dell'AUTOSAR può essere suddiviso in 3 fasi. Nella fase 1 dal 2004 al 06, lo sviluppo di base è stato fatto, nella fase 2 dal 2007 al 09 lo sviluppo di base è stato esteso all'architettura e alla metodologia. Nella fase 3 dal 2010 al 13, è possibile eseguire la protezione e i miglioramenti preferiti. Il lavoro sulla piattaforma adattiva è iniziato nell'anno 2016 e le principali azioni di sviluppo sono state finalmente pubblicate in una versione combinata di Classic, Adaptive & Foundation di AUTOSAR.
Cos'è AUTOSAR?
Il termine AUTOSAR sta per 'Automotive Open System Architecture'. È un'architettura software automobilistica standardizzata e aperta. Questa architettura supporta le interfacce all'interno del software applicativo e delle funzioni di base del veicolo. E aiuta anche a stabilire un'architettura software familiare del sistema di controllo del motore per tutti gli associati AUTOSAR.
AUTOSAR viene utilizzato per fornire vantaggi intrinseci agli associati per gestire sistemi elettrici ed elettronici più complessi in un veicolo come la semplice integrazione, cambiare le funzioni all'interno di una complessa rete di controllo del motore (ECU) e per controllare il ciclo di vita dell'intero prodotto.
Questa architettura software automobilistica è stata sviluppata congiuntamente da diversi produttori di automobili, sviluppatori di strumenti e fornitori. Questa piattaforma migliorerà le funzionalità di un veicolo nell'industria automobilistica senza disturbare il modello esistente.
L'unità di controllo del motore dell'automotive include le seguenti caratteristiche
- Una forte interfaccia con l'hardware come attuatori e sensori
- Interfaccia con sistemi bus all'interno del veicolo
- Include un microcontrollore a 16/32 bit
- Memoria flash interna o esterna
- Sistema in tempo reale
Architettura Autosar con esempio
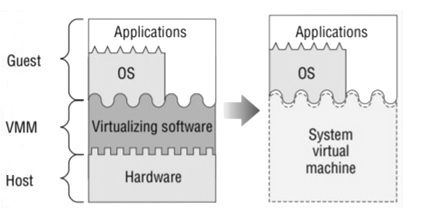
L'architettura dei livelli AUTOSAR suddivide il software in cinque livelli. In un primo momento, osserviamo un modello di livello caratteristico basato su OSI che spiega la disposizione gerarchica del software AUTOSAR. Per questo motivo, si suddivide in tre parti come software fondamentale, ambiente di runtime e livello dell'applicazione. In ogni livello, alcuni moduli software vengono astratti e questi livelli comunicano tramite interfacce.

Architettura AUTOSAR
Il diversi livelli di architettura AUTOSAR eseguito su un microcontrollore come un livello applicazione, RTE (ambiente di runtime), livello di servizio e BSW (software di base), ecc. Ciascun livello include moduli e servizi software predefiniti per rendere il software applicativo autonomo dall'unità di controllo del motore.
Livello applicazione
Il primo livello dell'architettura AUTOSAR è il livello dell'applicazione che supporta l'implementazione di funzionalità personalizzate. Include componenti software e diverse applicazioni per eseguire compiti esatti secondo le istruzioni.
Questo livello include tre componenti come il software applicativo, le porte del software e le interfacce delle porte. Per questi componenti, l'architettura garantisce interfacce standardizzate all'interno del livello dell'applicazione. I componenti software di questo livello aiuteranno a generare semplici applicazioni per supportare le funzioni del veicolo.
L'interazione tra questi componenti può essere consentita tramite porte esatte con un Function Bus virtuale. Queste porte faciliteranno l'interazione tra BSW di AUTOSAR e componenti software.
Questa è una panoramica dell'architettura di AUTOSAR e supporta forniture in tempo reale e vincoli di sicurezza. A seconda dell'MCU, la piattaforma standard supporta diverse applicazioni come la sicurezza e il networking consentendo alle unità di controllo del motore del veicolo di contattare sensori e attuatori del veicolo.
RTE (Runtime Environment)
RTE è un livello middleware che fornisce servizi di comunicazione ai componenti software di AUTOSAR e le applicazioni includono il sensore AUTOSAR o le parti dell'attuatore. Lo scopo principale di ciò è rendere i componenti software indipendenti per la mappatura su un preciso sistema di controllo del motore.
Le caratteristiche principali di RTE includono quanto segue.
- È specifico per il sistema di controllo del motore e l'applicazione.
- Viene generato per ogni centralina motore.
- La sua interfaccia è totalmente indipendente dalla centralina motore.
Livello di servizio
Questo è il livello software principale che fornisce diverse funzioni come le seguenti.
- Sistema operativo
- Servizio di memoria
- Comunicazione di rete per il veicolo
- Gestione dello stato della centralina motore
- Servizio di risoluzione dei problemi
Questo livello fornisce moduli e servizi software fondamentali per diverse applicazioni.
Le caratteristiche principali del livello di servizio includono quanto segue.
- Specifico per MCU ( unità microcontrollore ) e un elemento dell'hardware della ECU
- L'interfaccia di questo è indipendente per ECU e MCU
BSW (software di base)
Il livello software di base include tre livelli, vale a dire
- Strato di astrazione ECU
- Driver complessi
- MCAL (Microcontroller Abstraction Layer)
Strato di astrazione ECU
- L'interfaccia con lo strato di astrazione del microcontrollore e il driver del dispositivo esterno fornisce principalmente il diritto di accesso ai dispositivi che si trovano all'interno o all'esterno dell'MCU.
- L'interfaccia di programmazione dell'applicazione viene utilizzata per interfacciarsi con MCU.
- Lo scopo principale di questo livello è creare un livello software superiore indipendente dal layout hardware dell'unità di controllo del motore.
Le caratteristiche principali del livello di astrazione ECU includono quanto segue.
- Il montaggio può dipendere dall'hardware dell'ECU mentre è indipendente dall'MCU
- L'interfaccia di ordine elevato può essere indipendente per le unità hardware MCU e ECU
Driver complessi
Questi livelli vengono utilizzati per funzioni sfaccettate che non sono disponibili su altri livelli. Questo livello può accedere direttamente all'MCU. Gli esempi principali sono il controllo dei valori elettrici, controllo dell'iniezione , rilevamento dell'aumento di posizione, ecc.
Lo scopo principale è quello di soddisfare particolari funzioni e necessità di temporizzazione desiderate per azionare sensori composti e attuatori.
Le caratteristiche principali dei driver complessi includono quanto segue.
- Il montaggio dipende estremamente da ECU, MCU, ecc.
- L'interfaccia di ordine elevato può essere montata e standardizzata sulla base dell'interfaccia di AUTOSAR
MCAL (Microcontroller Abstraction Layer)
Questo modulo software è accessibile direttamente alle periferiche MCU su chip e ai dispositivi esterni mappati con la memoria. Lo scopo principale è creare un livello software superiore indipendente per MCU.
Le caratteristiche principali di MCAL includono quanto segue.
- Il montaggio dipende dall'MCU
- L'interfaccia di ordine elevato non dipende dall'MCU.
Obiettivi di AUTOSAR
Gli obiettivi principali di AUTOSAR includono quanto segue.
- Attivazione della ridondanza
- Le funzioni da una ECU all'altra ECU possono essere eseguite all'interno della rete
- Manutenibilità durante l'intero ciclo di vita del prodotto
- Incorporazione di moduli funzionali di molti fornitori
- Maggiore utilizzo dell'hardware COTS.
- Aggiornamenti software per tutta la durata di vita dell'automobile.
- Scalabilità a varie automobili
- Implementazione di funzioni essenziali come una soluzione core tipica del settore
- Requisiti di sicurezza
Vantaggi e svantaggi di AUTOSAR
I vantaggi di AUTOSAR includono quanto segue.
- La condivisione del software può essere possibile tra diverse società
- Riusabilità del componente software
- L'architettura software di base è a strati.
- Coerenza delle interfacce
- Interoperabilità
- Il codice software può essere riutilizzato.
- La flessibilità del design è più
- Costi e tempi di sviluppo saranno ridotti
- L'efficienza può essere aumentata nell'ambito dello sviluppo funzionale
- Trasparenza e interfacce distinte consentiranno nuovi modelli di business.
Gli svantaggi di AUTOSAR includono quanto segue.
- Complessità
- Investimento iniziale
- Curva di apprendimento
Applicazioni di AUTOSAR
Le applicazioni dell'architettura Autosar includono quanto segue.
- Infotainment
- Sensori come LIDAR e RADAR
- Manutenzione predittiva
- Elettrificazione
- ADAS funziona con una fotocamera
- v2x
- Aggiornamenti delle mappe
- App automobilistiche
Domande frequenti
1). Cos'è AUTOSAR?
L'architettura del sistema aperto automobilistico è un tipo di architettura software automobilistica, sviluppata da diversi fornitori, produttori di automobili, ecc.
2). Qual è lo scopo di AUTOSAR?
Ciò consente l'uso di un progetto software basato su un modello di componenti per un sistema veicolare.
3). AUTOSAR è un sistema operativo?
No, ma ha una specifica per il sistema operativo.
4). Qual è il ruolo di RTE in AUTOSAR?
Viene utilizzato per fornire i servizi di infrastruttura per consentire la comunicazione tra i componenti software che accedono ai moduli software fondamentali come il sistema operativo e servizio di comunicazione.
5). Quali sono i livelli nell'architettura AUTOSAR?
Esistono tre tipi di livelli come RTE, livello di servizio e software di base.
6). Chi ha sviluppato questa architettura AUTOSAR?
È sviluppato da sviluppatori di strumenti, fornitori di automobili e dai suoi produttori.
7). Come imparare AUTOSAR?
Innanzitutto, impara le basi da persone esperte e inizia a realizzare progetti per sviluppare le ECU a seconda della sua architettura. Inoltre, crea alcuni esempi in Matlab e passa attraverso il codice generato.
Quindi, questo è tutto una panoramica di AUTOSAR . È un'architettura software automobilistica standardizzata, sviluppata da vari fornitori e produttori di automobili. L'obiettivo principale di questo è creare uno strato tra il software applicativo e l'hardware della ECU. Pertanto, questo software è principalmente indipendente da qualsiasi microcontrollore preferito nonché da un produttore di automobili per renderlo riutilizzabile per un numero di sistemi di unità di controllo del motore individuali. Ecco una domanda per te, qual è la forma completa di AUTOSAR?