Con lo sviluppo delle tecnologie, soprattutto nella tecnologia robotica, i robot sono predominanti in molte delle applicazioni. Alcuni di questi sono di tipo altamente rischioso e aree pericolose. Le applicazioni militari e sul campo di battaglia stanno ora aumentando il loro utilizzo dei robot in alcune attività cruciali e complicate. In uno dei miei articoli, ho descritto l'uso dei robot come spia nelle operazioni militari. E se fosse necessario difendersi il veicolo robotico o un attacco del robot? È qui che nasce la necessità di un robot integrato con un meccanismo di attacco. Uno di questi esempi è il veicolo robotico con una pistola LASER.

Veicolo robotico a controllo RF con disposizione del raggio laser
Un tale robot viene utilizzato fondamentalmente nelle operazioni militari e anche dalla polizia stradale per rilevare la velocità dei veicoli in movimento.
Prima di entrare nei dettagli sui robot con pistole laser, diamo una rapida comprensione del LASER come arma.
Un raggio LASER (Light Amplification by Stimulation Emission) è una luce unidirezionale fortemente focalizzata a differenza di quella di una semplice lampadina. Consiste in avvallamenti e creste sincronizzati, cioè le onde non interferiscono tra loro. Questo produce una luce fortemente focalizzata di potenza molto elevata dell'ordine da 1000 a 1 milione di volte maggiore di una tipica lampadina. È un dispositivo che controlla l'emissione e l'assorbimento dei fotoni pompando quantità sufficienti di energia. In questo, la sorgente dei fotoni viene amplificata in un fascio di luce. La lunghezza d'onda di questi laser è variata in diversi spettri come visibile, infrarosso e ultravioletto.
Il principio alla base del LASER ruota attorno a tre cose: assorbimento, emissione spontanea ed emissione stimolata. Una quantità adeguata di energia dal fotone interagisce con l'atomo, facendo saltare l'atomo da uno stato di energia inferiore a uno stato di energia superiore. Questo atomo torna allo stato di energia inferiore emettendo un fotone chiamato emissione spontanea. Nell'emissione stimolata c'è il rilascio di energia dall'atomo con mezzi artificiali. quindi il fotone interagisce con l'atomo eccitato, ha la stessa energia e polarizzazione del fotone incidente.
Ora diamo uno sguardo alle parti hardware del robot
- Base: La base di un tale robot può essere qualsiasi corpo cubico con ruote attaccate per il suo movimento.
- Motore a corrente continua: Il robot è costituito da due motori CC azionati dai driver del motore e fornisce il movimento richiesto al robot.
- Centralina: Il movimento del robot è controllato utilizzando un modulo di comunicazione RF. Il trasmettitore è costituito da pulsanti, microcontrollori, un decodificatore e un trasmettitore RF mentre l'unità ricevente incorporata nel robot è costituita da un codificatore e da un modulo ricevitore RF per controllare il movimento robotico .
- Una pistola LASER: Una pistola LASER è montata sul robot che svolge il compito principale del robot.
Un'anteprima del funzionamento del robot
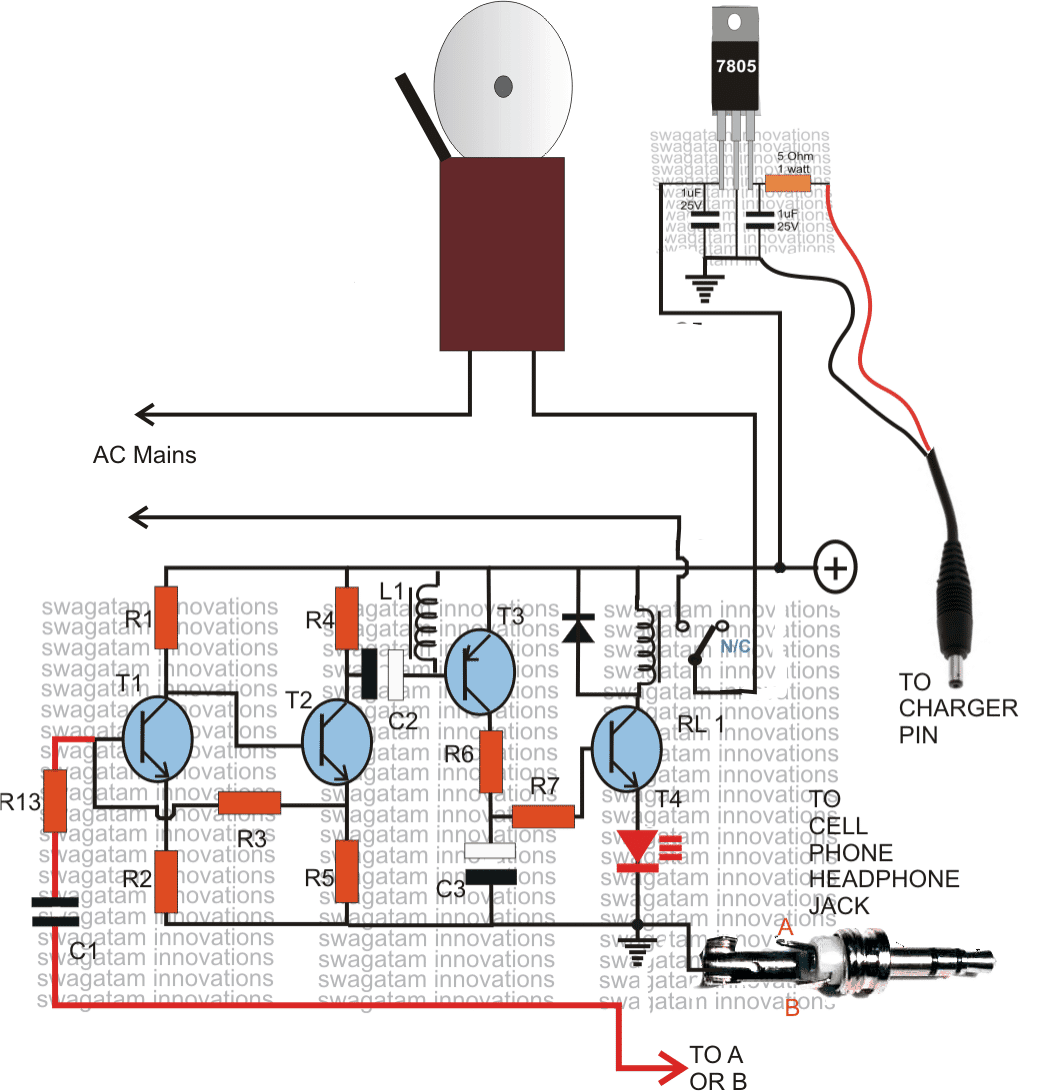
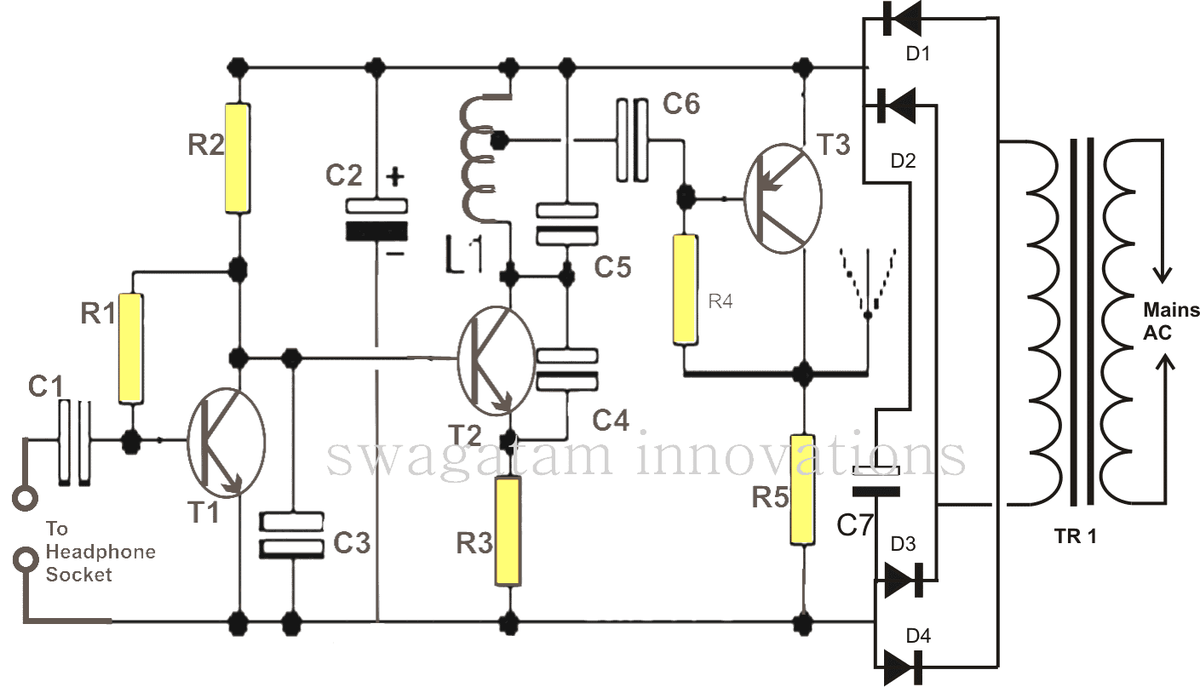
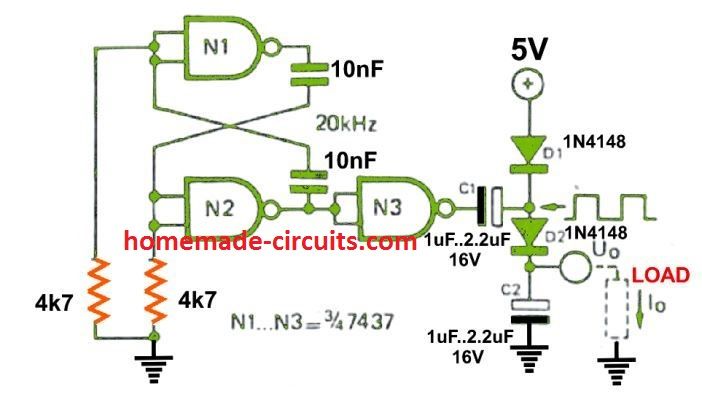
Il robot mentre si muove nella direzione richiesta emette un forte raggio di luce dalla pistola LASER che può danneggiare il bersaglio o semplicemente produrre un punto per rilevare il bersaglio. Il LASER deve essere guidato da alcune fonti di energia. In un semplice prototipo che utilizza una penna LASER di base, il dispositivo è pilotato da un transistor che funge da interruttore. Il transistor riceve il segnale logico basso dal microcontrollore e si trova in condizione di spento, rendendo il modulo LASER direttamente collegato all'alimentazione a 5 V.

Pistola laser azionata da transistor che funziona come un inverter
Controllo del robot
Per controllare il movimento del robot, è necessario controllare il funzionamento dei motori. Questo può essere fatto utilizzando un'operazione controllata da RF dei driver del motore. I comandi vengono trasmessi utilizzando un trasmettitore RF a una distanza di circa 200 metri e ricevuti dal ricevitore RF per azionare i motori.
L'unità trasmettitore è composta da diversi pulsanti che fungono da interruttori di comando per muovere il robot in qualsiasi direzione desiderata. I pulsanti sono interfacciati con il microcontrollore, che è programmato per inviare dati in forma parallela in base all'ingresso del pulsante, all'encoder. L'encoder converte questi dati paralleli in forma seriale e questi dati seriali vengono trasmessi utilizzando il modulo trasmettitore RF attraverso un'antenna.

Diagramma a blocchi che mostra la sezione del trasmettitore
L'unità ricevente è costituita da un modulo ricevitore RF che riceve il segnale modulato e lo demodula. Il decoder riceve il segnale demodulato in forma seriale e lo converte in forma parallela. Il microcontrollore riceve i segnali e controlla di conseguenza il driver del motore. Il driver del motore utilizzato in LM293D che può controllare 2 motori alla volta.

Diagramma a blocchi che mostra la sezione del ricevitore
Così utilizzando la comunicazione RF possiamo controllare il robot.
Nelle descrizioni sopra, ho dato una breve idea di un semplice prototipo di un veicolo robotico con un raggio LASER. Nelle applicazioni reali, normalmente vengono utilizzati sistemi di comunicazione a lungo raggio come GSM o DTMF per controllare il robot da luoghi remoti.
3 applicazioni del veicolo robotico con pistola laser:
- Rilevamento del bersaglio : Il veicolo robotico può utilizzare il raggio LASER per creare un punto sul bersaglio, in modo che sia facilmente visibile e possa essere mirato. Un esempio è l'Air Borne LASER.
- Target Destruction : Un forte Raggio laser dell'ordine di 95 GHz di frequenza può causare una sensazione di bruciore nel corpo umano poiché penetra nella pelle di 1/64thdi un pollice e l'energia del raggio può riscaldare le molecole d'acqua nel corpo. Un esempio è l'Active Denial System sviluppato dagli USA.
- Target Range Finder e rilevamento della velocità : Il raggio LASER del veicolo robotico può essere utilizzato per trovare la portata del bersaglio in base al principio della riflessione della luce LASER e anche la velocità del bersaglio può essere calcolata una volta ottenuta la distanza.
Quindi ora abbiamo una breve idea sui robot che hanno usato un rilevatore di bersagli e un distruttore. Ha qualche utilità per il pubblico normale oltre ai militari? Pensa e rispondi.