Il post spiega un metodo che può essere probabilmente utilizzato per migliorare la capacità di un sensore a infrarossi passivo di rilevare anche una presenza umana statica o fissa. Questa caratteristica normalmente non è possibile con i sensori PIR convenzionali.
Come PIR rileva la presenza umana
Ho già discusso molte applicazioni di rilevatori di movimento basati su PIR in questo sito Web, tuttavia tutte queste applicazioni richiedono che la presenza umana sia costantemente in movimento per mantenere il PIR in grado di rilevare la loro presenza, questo sembra essere un grosso inconveniente che impedisce a queste unità di rilevare un'occupazione umana costante o stazionaria.
Tuttavia, l'inconveniente sopra spiegato ha una ragione dietro di esso. I sensori PIR convenzionali funzionano rilevando i segnali IR da un corpo umano attraverso un paio di fessure parallele sulla lente frontale e il suo circuito interno si attiva solo quando i segnali IR si incrociano tra queste fessure di rilevamento ('visioni').
L'incrocio dei segnali IR attraverso gli slot di rilevamento consente al circuito PIR di tradurre le informazioni in due corrispondenti impulsi alternati, che a sua volta viene rettificato per generare la tensione di attivazione sul pin di uscita del PIR.
Il PIR non è in grado di rilevare il target di cancelleria
Ciò implica che se la sorgente IR è immobile, non richiederà al modulo PIR di produrre alcun trigger sul suo pin di uscita. Implica anche che il segnale IR dalla sorgente debba in qualche modo continuare ad attraversare gli slot di rilevamento PIR dati per consentirgli di rilevare un determinato essere umano all'interno della zona.
Sembra che non ci sia un rimedio diretto o semplice per questo, perché i moduli PIR non possono essere modificati internamente per questo, il che impedisce all'unità di rilevare la presenza umana stazionaria.
Tuttavia, un'osservanza logica ci dice che se è una sorgente IR variabile che potrebbe essere richiesta per mantenere il modulo PIR attivato, allora perché non forzare il PIR stesso a essere in un movimento costante invece del soggetto.
Il concetto può essere visualizzato dalla seguente simulazione GIF, che mostra un modulo PIR oscillante e un essere umano statico nella zona di rilevamento.

Qui possiamo vedere come un PIR oscillante si adatta al problema e si trasforma consentendo il rilevamento anche di soggetti IR statici.
Ciò diventa possibile perché attraverso il suo movimento il modulo PIR trasforma la sorgente IR fissa in un'immagine IR che cambia continuamente attraverso i suoi due slot di ricezione.
Sebbene l'idea sembri complessa, in realtà può essere semplicemente risolta utilizzando un circuito motore controllato da PwM a oscillazione lenta.
Impareremo l'intero meccanismo ei dettagli del circuito nelle sezioni seguenti.
Come abbiamo già discusso, i moduli PIR convenzionali sono in grado di rilevare solo oggetti viventi in movimento e non possono identificare un bersaglio stazionario, il che rende la sua applicazione limitata solo come rilevatore di movimento umano.
Per le applicazioni in cui il rilevamento dell'occupazione umana senza moti diventa necessario in tali scenari, un PIR convenzionale può diventare inutile e potrebbe richiedere una disposizione esterna per l'aggiornamento stesso.
Progettazione di PIR per rilevare bersagli immobili
Nella sezione precedente abbiamo appreso che invece di aver bisogno che il bersaglio sia in movimento, il modulo PIR può essere spostato su un dato raggio per implementare il rilevamento statico del bersaglio desiderato.
Nelle sezioni seguenti apprendiamo un semplice meccanismo circuitale che può essere utilizzato con un PIR montato su un piccolo motore CC per le oscillazioni proposte.
Il driver del motore controllato da PWM / Flip Flop
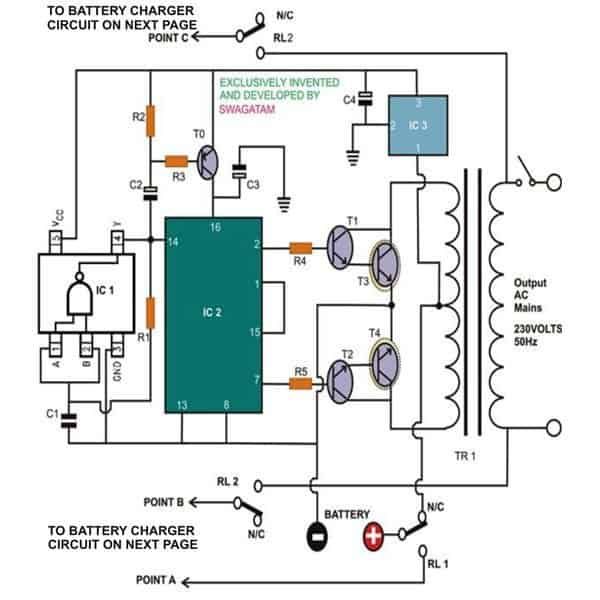
Il sistema fondamentalmente richiede una determinazione della velocità controllata da PWM e un cambio di flip flop per il motore. Il diagramma seguente mostra come queste caratteristiche possono essere attribuite al motore PIR con l'aiuto di un semplice circuito:

Il circuito mostrato utilizza un singolo IC HEF40106 esadecimale invertente schmitt gate IC che include 6 porte NON inverter.
Le porte N1 e N2 sono configurate per produrre un'uscita PWM regolabile che viene alimentata alle porte N4, N5, N6 che formano i buffer.
L'uscita comune da questi gate buffer è terminata con il gate di un mosfet del driver del motore.
Il contenuto PWM viene impostato con l'aiuto di P1, che viene infine applicato al motore collegato tramite una serie di contatti relè DPDT.
Questi contatti del relè determinano la direzione del movimento del motore (in senso orario o antiorario).
Questi contatti del relè DPDT flip flop sono controllati da un timer instabile configurato attorno al gate N3, in cui il condensatore C3 / R3 determina a quale velocità il relè deve cambiare per consentire al motore di cambiare la sua direzione di rotazione in modo coerente.
Il progetto di cui sopra consente al motore di eseguire il movimento oscillante lento avanti e indietro richiesto attraverso una data zona radiale.
C3 può essere selezionato per avviare la commutazione dopo ogni 5-6 secondi e il PWm può essere regolato per consentire un movimento del motore estremamente lento, perché deve solo garantire che gli slot del PIR attraversino i segnali IR del bersaglio un modo tempestivo.
Tuttavia, poiché il funzionamento del motore è lento, l'uscita dal PIR dovrà essere sostenuta tramite un timer di spegnimento ritardato in modo che il carico collegato non si spenga e si accenda mentre il movimento del motore taglia alternativamente le linee IR dall'occupazione umana.
Il timer di ritardo
Il seguente fase del circuito del timer di ritardo può essere utilizzato in modo che ogni volta che l'uscita PIR produce l'impulso rilevato, il ritardo dal timer viene esteso da 5 a 10 secondi e il carico collegato non viene mai interrotto durante il processo.

Nella configurazione di cui sopra possiamo vedere il motore che riceve la sua alimentazione elettrica dallo stadio PWM / flip flop come discusso nel paragrafo precedente.
Il mandrino del motore può essere visto accoppiato con un albero orizzontale sul quale è bloccato il PIR, in modo tale che quando il motore si muove, il PIR attraversa un movimento radiale di andata e ritorno corrispondentemente variabile.
Mentre il movimento PIR di cui sopra è indotto, i segnali IR da un bersaglio fisso nella zona vengono rilevati sotto forma di brevi impulsi alternati, che vengono generati sul pin di uscita del PIR indicato con il filo blu.
Questi impulsi vengono applicati attraverso il condensatore da 1000uF che si carica ad ogni impulso e assicura che il BC547 sia mantenuto in modalità di conduzione senza interruzioni durante il processo.
Il driver del relè che comprende lo stadio BC557 risponde al segnale stabile di cui sopra dal collettore BC547 e a sua volta mantiene il relè ON, fintanto che il PIR continua a rilevare una presenza umana.
Il carico del relè rimane così attivato continuamente a causa della presenza di un essere umano fermo nell'area.
Tuttavia, nel caso in cui l'occupazione umana venga rimossa o quando il target si allontana dalla zona, la fase del timer di ritardo mantiene il relè e il carico attivi per i 5-10 secondi previsti, dopodiché si spegne permanentemente, fino a quando la zona non viene nuovamente catturata da una potenziale fonte di emissione di IR.
Elenco delle parti
- R1, R4 = 10K
- R2 = 47 OHM
- P1 = 100K POT
- D1, D2 = 1N4148
- D3 = MUR1560
- C1, C2 = 0,1 uF / 100 V.
- Z1 = 15 V, 1/2 WATT
- Q1 = IRF540
- Q2 = BC547
- N1 --- N6 = IC MM74C14
- DPDT = INTERRUTTORE DPST O RELÈ DPDT
- R3, C3 deve essere determinato da alcuni tentativi ed errori
AGGIORNARE:
Il circuito PIR sopra spiegato per rilevare la presenza umana statica può essere molto semplificato impiegando un circuito chopper di segnale come illustrato nella seguente simulazione GIF:
Un'attenta ispezione mostra che in realtà un movimento oscillatorio semplicemente non è richiesto, il motore e la lama del trinciapaglia potrebbero ruotare liberamente mantenendo il velocità del motore a un livello inferiore .
Ciò consentirebbe anche di realizzare efficacemente l'operazione di rilevamento PIR statica prevista.

Demo video che dimostra il rilevamento statico umano per un PIR
Precedente: 3 circuiti di interruttori attivati dal suono spiegati Avanti: 4 semplici circuiti sirena che puoi costruire a casa