UN drone multirotore è un tipo di UAV con vari rotori, come quattro rotori, sei rotori, otto rotori o anche di più, in base al loro design e utilizzo. Ma i rotori extra di questo drone possono aumentare la capacità di carico utile, il tempo di volo, la stabilità, ecc. Questi sono i più economici e più semplici droni , fornendo un elevato controllo sull'inquadratura e sulla posizione. Pertanto, questi sono ideali per la sorveglianza e la fotografia aerea. I droni multirotor sono disponibili in diversi tipi, come droni multi-rotore coassiali e coacopter, octocopter e droni multi-rotori coassiali. Questi sono i tipi UAV più comuni e ogni tipo di drone differisce nelle sue prestazioni, design e abilità. Questo articolo elabora uno dei tipi di droni multirotori, come il quadruticolo, il suo lavoro e le applicazioni.
Che cos'è un quadrumolo?
Un quadricottero è un tipo di UAV che è alimentato da quattro Rotori , dove ogni rotore ha un motore e un'elica. Un drone quadricottero utilizza quattro rotori per il sollevamento e la propulsione, in modo che possa decollare e atterrare verticalmente e andare in posizione. Quindi i due rotori di questo drone girano in senso orario, mentre gli altri due rotori girano in senso antiorario per annullare la coppia e dare un controllo costante di volo. Questo può essere controllato manualmente o in modo indipendente, quindi è uno dei tipi più popolari di droni grazie alla sua semplicità, stabilità e manovrabilità.
I quadricotteri sono differenziati dal loro design a quattro rotori per controllare l'aerodinamica, la meccanica ed elettronica avanzati. Il suo design esclusivo fornisce manovrabilità e stabilità superiore rispetto ai soliti elicotteri a rotore singolo.
Storia dei quadrumori:
Il quadricottero è un tipo di drone multi-rotore che si è evoluto ampiamente dai suoi primi progetti. Quindi la storia passo-passo del quadricottero è discussa di seguito.
- Jacques e Louis Bréguet nel 1907 svilupparono e testarono il Gyroplane n. 1. È un'idea del Quadcopter precoce, raggiungendo il decollo ma affrontando l'instabilità basata su sistemi aerospaziali crociati.
- Etienne Oehmichen ha creato un altro primo quadricottero come Oehmichen nel 1920, che dimostra il volo e stabilendo un record globale.
- Nella Marina degli Stati Uniti, 1930 sperimentò gli aerei a radio-controllati, che portò allo sviluppo del drone Curtiss N2C-2.
- Il Bell Boeing Quad Tiltrotor nel 1990 ha combinato sia i progetti di ala fissa che quadricotteri per applicazioni di trasporto militare.
- Amazon ha proposto una tecnologia di droni commerciali nel 2013 per un sistema di consegna
- Airbus ha sviluppato un quadricottero alimentato a batteria nel 2018 per i taxi dell'aria urbana per mirare all'operazione autonoma ad un certo punto.
- Al momento, questi droni sono ampiamente utilizzati per scopi diversi come voli ricreativi, fotografia aerea, consegna, sorveglianza, ecc.
Componenti di un quadrumo
Un quadricottero è progettato con diverse chiave componenti , che sono spiegati di seguito.

Telaio
Il telaio del quadricottero ha braccia che contengono motori, batterie, controller di volo, ecc.
Motori
Il quadricottero include quattro motori, che vengono utilizzati per sollevarlo. Ma ci sono diversi tipi di motori disponibili sul mercato.
Esc
Dal quadricottero motori Generalmente richiede 3 alimentazione 3-fase, non possiamo usarla come fornitura diretta. Quindi abbiamo bisogno di ESC per cambiare i segnali del controller e inviarli ai motori per controllare la loro velocità.
Eliche
Le eliche sono una componente significativa del drone. Queste sono lame rotanti che funzionano come ali sul tuo drone e creano il flusso d'aria per sollevare il drone in aria.
Controller di volo
La funzione principale del controller di volo è quella di dirigere il regime di ciascun motore in risposta all'input. Quindi il comando pilota per il quad-copter aiuta ad andare avanti e viene immesso nel controller di volo per decidere come controllare i motori, di conseguenza.
Trasmettitore e ricevitore RC
Controllo dei trasmettitori e dei ricevitori radio elettricità , che si traduce in una trasmissione di dati utile attraverso lo spazio o l'atmosfera. Usano i segnali radio per inviare i comandi in modalità wireless tramite un set di radio sopra il ricevitore radio. Quindi è collegato al controller di volo del Quadcopter, che è controllato a distanza.
Batteria
Un quadricottero utilizza una fonte di alimentazione della batteria per guidare tutti i sistemi del drone permettendolo di volare. Finalmente, è necessaria una batteria polimerica di litio (LiPO) per alimentare il quadro, quindi il tempo di volo del quadricottero dipende principalmente dalla capacità della batteria. La selezione di una batteria dipende principalmente dalle sue dimensioni, tensione, valutazione C, capacità, ecc.
Varie
Varie include i minuscoli accessori come diversi cavi jumper e connettori a proiettile, che rendono il tuo quadricottero perfetto e più stabile.
Come funziona un quadricottero?
I quadricotteri possono volare con quattro rotori, dove ciascuno include un motore e un'elica per produrre il controllo di sollevamento e movimento all'interno dell'aria. Questi droni possono ottenere il volo cambiando la velocità di ciascun rotore, influenzando così la quantità di sollevamento e spinta generati consentendo il movimento controllato in tutte le direzioni.
Il volo di un quadricottero si basa sul principio di spinta e controllo preciso dei quattro rotori. Pertanto, ecco una rottura del suo lavoro.
- Una volta che tutti e quattro i rotori girano, producono un flusso d'aria verso il basso e spingono verso l'alto. Ogni volta che il totale generato dai rotori supera il peso del quad-copter, poi decolla.
- Per andare in posizione in posizione, il controller di volo cambia tutte e quattro le velocità dei rotori per produrre una spinta sufficiente per compensare la gravità.
- La velocità dei quattro rotori è ugualmente aumentata per generare più spinta rispetto al peso. Quindi la velocità sarà ridotta a scendere.
- I rotori posteriori girano più facilmente e si muovono in avanti rispetto ai rotori anteriori e l'inclinazione del quadricottero in avanti produce spinta. La velocità del movimento all'indietro dei rotori anteriori può essere raggiunta aumentando.
- I rotori laterali destra di questo drone girano più velocemente per muoversi a sinistra rispetto ai rotori sinistra e inclina il drone del quadrile a sinistra. Qui, il movimento sul lato destro può essere ottenuto aumentando la velocità del rotore sinistro.
- Per ruotare la imbardata in senso orario, due rotori che sono diagonalmente opposti ruotano più velocemente, mentre gli altri due rotori girano più lentamente, creando così una forza rotante. Invertendo questo, è possibile ottenere una rotazione in senso antiorario.
- I dati del sensore possono essere monitorati costantemente dal controller di volo. Quindi fa micro-aggiustamento alla velocità di ciascun motore per mantenere la stabilità ed eseguire i comandi del pilota.
Tipi di quadricotteri
Esistono diversi tipi di quadricotteri disponibili sul mercato in base alle loro forme di frame e usi previsti, che sono spiegati di seguito.

X Quadcopter o X-Configuration:
Questo tipo di quadricottero ha il design più popolare che offre un buon equilibrio e manovrabilità di stabilità. È utilizzato in una varietà di applicazioni come videografie, corse, fotografia aerea, volo acrobatico, corse FPV,
H-Configurazione H-Configurazione H o H:
H Quadcopter ha un telaio a forma di H, che fornisce una migliore stabilità. Quindi questo drone può essere usato nella fotografia aerea, basata sulla deviazione.
+ Quadcopter o + Configuration:
Questo quadricottero eccelle all'interno di corsie di volo diritte, comprese le posizioni dell'elica aerodinamicamente efficienti, utilizzate frequentemente all'interno del volo acrobatico. È utilizzato in schemi di controllo più semplici di alcune applicazioni.
Configurazione Y4 Quadcopter o Y4:
Questo drone è simile a un tricopter con tre bracci, ma il suo braccio posteriore include due motori che sono montati in modo coassico per un migliore controllo di imbardata e potenza di sollevamento.
Quadcopter A-co-tail o a V-Tail:
Questo drone è simile a Y4quadcopter, tranne con i motori posteriori situati ad un angolo in una forma A o V, che fornisce un maggiore controllo di imbardata.
Quadcopter usando Arduino
Un controller di volo è il cervello del quadricottero. In generale, ci sono molti controller di volo pre-battiti disponibili anche sul mercato con meno costi. Quindi un controller di volo progettato con Arduino per un quadricottero è mostrato di seguito. Il multiwii è un famoso software di controller di volo utilizzato per i quadrifogli.
Quindi progettiamo un quadricottero con Arduino, come mostrato di seguito. Non è solo un quadricottero ma anche una macchina open source. I componenti richiesti per realizzare questo quadricottero usando Arduino includono: ESC, Bluetooth , MPU-6050, resistenza 330 ohm, GUIDATO indicatore, ricevitore, Arduino Nano R3 e fili di collegamento.

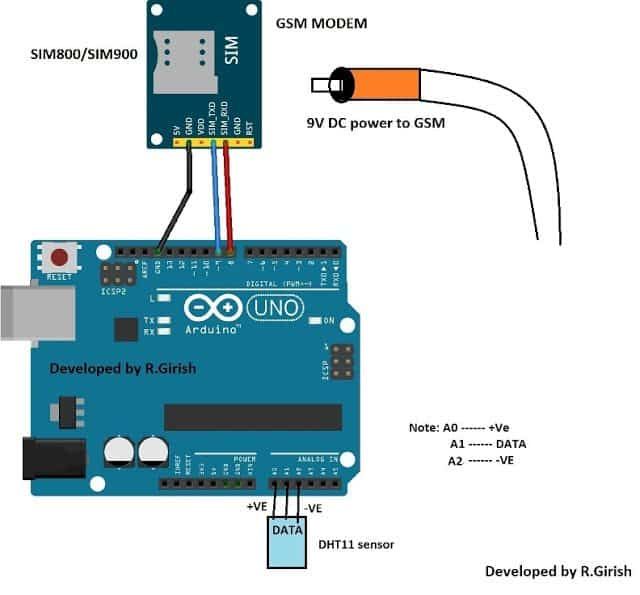
Connessioni:
Le connessioni di questa interfaccia seguono come;
- Collegare il pin D3 di Arduino Nano al pin di segnale ESC 1.
- Collegare il pin D9 di Arduino Nano al pin di segnale ESC 3.
- Collegare il pin D10 di Arduino Nano al pin di segnale ESC 2.
- Collegare il pin D11 di Arduino Nano al pin di segnale ESC 4.
- Collegare il pin TX del modulo Bluetooth al pin Rx dell'Arduino.
- Collegare il pin Rx del modulo Bluetooth al pin TX di Arduino.
- Il pin A4 di Arduino è collegato al pin SDA di MPU-6050.
- Il perno A5 di Arduino è collegato al pin SCL di MPU-6050.
- Collegare un terminale del LED al pin D8 di Arduino e l'altro terminale all'alimentazione attraverso un resistore.
- Il perno D2 di Arduino è collegato al perno dell'acceleratore del ricevitore.
- Collegare il pin D4 di Arduino al pin di Eleron del ricevitore.
- Il pin D5 di Arduino è collegato al pin Aileron del ricevitore.
- Il pin D6 di Arduino è collegato al pin del timone del ricevitore.
- Il pin D7 di Arduino è collegato al pin Aux 1 del ricevitore.
Lavorando
Ora collega tutti i motivi con i terminali di terra di Arduino. Quindi include tutti i terreni del ricevitore, il modulo Bluetooth, i terreni ESC e i terreni MPU. Successivamente, fornire una connessione di sorgente di alimentazione 5 V collegando il GND della batteria al GND di tutti i componenti. Il filo di colore rosso è collegato a Arduino, pin da 5 V, modulo Bluetooth e MPU.
Ora fornisce la scheda e Arduino è pronto ad aggiungere codice tramite un computer. Normalmente il controller di volo Arduino funziona con una programmazione di computer. Per questo, devi scaricare prima il multiwii 2.4 e puoi scaricare direttamente il codice.
È un software FC molto popolare utilizzato per i multi-rotori attraverso una grande comunità. Perché questo software supporta una varietà di multi-copter con funzionalità superiori come il controllo Bluetooth con lo smartphone, il barometro, il display OLED, la posizione della posizione GPS e il ritorno a casa, il magnetometro, le strisce LED, ecc.
Noterai come si sposta immediatamente il controller di volo, sullo schermo si possono notare i valori dei dati dell'accelerometro e del giroscopio. Quindi l'orientamento FC può essere visto in fondo. In questa interfaccia, è possibile modificare i valori PID del segnale e regolare il quadricottero per eguagliare le preferenze personali. In questa interfaccia, le modalità di volo possono anche essere assegnate a determinate posizioni di interruttore ausiliario. Ora, tutto ciò che devi fare è trovare una posizione per il controller di volo Arduino sul telaio che è impostato per colpire i cieli.
Arduino Quadcopter funziona con tutti i componenti richiesti per creare spinta consentendo il volo e la manovrabilità. Quindi Arduino MicroController funziona come un controller di volo che ottiene input e invia segnali agli ESC per ottenere movimenti desiderati come l'ascesa, il mouse, la svolta e la caduta.
Fondamentalmente, Arduino Quadcopter unisce hardware con software per creare una macchina volante. Quindi esegue una varietà di manovre a seconda dell'input e del feedback dell'utente.
Differenza B/n Quadcopter vs Drone
La differenza tra un quadricottero e un drone include quanto segue.
|
Quadcopter |
Drone |
| Un quadricottero è un drone che si distingue per il suo design del rotore. | Il drone è un termine generale per qualsiasi veicolo aereo UAV o senza pilota. |
| È progettato con quattro rotori o eliche situate su un telaio leggero. | Comprende una varietà di design come ad ala fissa, VTOL ibrido, multirotore, ecc. |
| Questo drone può decollare in verticale e atterrare e andare in atto. Questi sono più manovrabili rispetto ai droni ad ala fissa. | Questo drone può variare notevolmente in base al design. |
| Esempi di quadricotteri sono: DJI Phantom, DJI Mavic, droni per hobby più piccoli, ecc. | I suoi esempi sono: droni di servizio di consegna, fotografia aerea, ispezione agricola, ecc. |
| Hanno quattro rotori .. | I droni hanno numeri diversi (o) ala fissa. |
| I quadricotteri sono normalmente più leggeri e più piccoli. | Questi sono più grandi e più complessi. |
| Questi sono usati in videografia, fotografia, volo ricreativo, ecc. | I droni sono applicabili in settori industriali, commerciali e militari. |
Vantaggi e svantaggi
IL Vantaggi dei quadrumori includere quanto segue.
- Hanno molti vantaggi grazie al loro design e capacità unici
- I quadricotteri hanno prestazioni stabili.
- Questi sono versatili e semplici da usare.
- Hanno manovrabilità e accessibilità.
- Possono librarsi e ottenere voli stabili.
IL Svantaggi del Quadcopter includere quanto segue.
- Ha tempo e velocità di volo limitati.
- Questi hanno un design complesso con varie parti vulnerabili ai danni.
- Dipendono dai motori elettrici a causa della necessità di particolari cambiamenti dell'acceleratore, principalmente per la stabilizzazione.
- Questi sono meno efficienti rispetto ai droni ad ala fissa.
- Questi possono essere influenzati dalle condizioni meteorologiche.
- Considerazioni sulla sicurezza:
- I quadricotteri possono diventare instabili a causa del loro design multi-rotore, che può potenzialmente portare a incidenti o volo irregolare.
- La sua velocità di trasferimento dei dati è molto lenta.
Applicazioni
IL Applicazioni Quadcopter includere quanto segue.
- I quadricotteri sono utilizzati in diverse applicazioni, che includono lo spanning di una varietà di settori e attività.
- Questi possono essere utilizzati nelle attività di fotografia aerea, ricerca e salvataggio, sorveglianza, consegna e tempo libero, nonché acrobazie e corse.
- Questi possono essere utilizzati anche in agricoltura, ispezione delle infrastrutture, monitoraggio ambientale, ecc.
- I quadricotteri sono utilizzati in applicazioni industriali e commerciali, tra cui: fotografia aerea, videografia, agricoltura di precisione, sicurezza, sorveglianza, servizi di consegna, agricoltura di precisione, ispezione delle infrastrutture, monitoraggio ambientale, ecc.
- Questi sono utilizzati in applicazioni del settore pubblico come la sicurezza pubblica, la ricerca e il salvataggio, le forze dell'ordine, la gestione delle catastrofi, ecc.
Quindi, questo è una panoramica di un quadrumo , funziona e le sue applicazioni. È un UAV versatile (veicolo aereo senza pilota) con varie applicazioni come la videografia, il volo ricreativo, la fotografia aerea, ecc. Questi droni svolgono un ruolo chiave in diversi campi come il rilevamento, la ricerca, le operazioni di salvataggio, la mappatura, ecc. Quindi, i quadricotteri rappresentano una vasta gamma. Ecco una domanda per te: che cos'è un UAV?