Il post spiega un semplice circuito di pilotaggio del motore controllato da laser a linea, che funziona rispondendo a una linea laser orizzontale di precisione, generata da un dispositivo di livello laser a linea, e regola automaticamente l'allineamento dell'utensile collegato o il lavoro di lavoro con estrema perfezione e accuratezza.
Cos'è Line Laser
L'attrezzatura laser di linea è un sostituto elettronico di alta precisione del vecchio allineatore di livella a bolla d'aria dei falegnami.
Il dispositivo laser di linea è in realtà un'apparecchiatura di emissione laser avanzata in grado di generare un 360 ° Linea laser orizzontale illuminata ad alta precisione, per fornire un riferimento di calibrazione a tutti i lavori di ingegneria industriale o edile, in modo che il risultato finale del lavoro sia perfettamente dritto e allineato senza il minimo errore.
Il circuito è stato richiesto da uno degli appassionati lettori di questo blog, il Sig. Rafal.
Le discussioni dettagliate riguardanti la procedura di lavoro del motore a controllo laser di linea possono essere apprese dai seguenti paragrafi:
Obiettivo di progettazione
Sig. Rafal: Sono molto nuovo in questo. Ho fatto alcune ricerche nelle ultime settimane e non ho trovato esattamente quello che mi serve.
Sarò grato per qualsiasi aiuto. Allego una foto della mia idea. Voglio controllare due motori a 12 V CC con una livella laser.
Il livello del laser a linee segnalerà i ricevitori.

Questo segnale dovrà quindi controllare la direzione del motore a 12 V CC. Il motore ruota l'asta filettata avanti e indietro per regolare l'altezza dell'utensile.
Da quello che ho scoperto, ci sarebbero diversi fotodiodi collegati in parallelo, uno impostato per rilevare il laser sopra il livello zero e l'altro sotto quel livello. Il livello nullo è solo una sorta di pausa tra i fotodiodi per impedire al sistema di attivarsi. Sensore laser senza display. Ho dato solo una foto pittorica.
Ho bisogno di un circuito H bridge, ma tutti quelli trovati da me devono essere utilizzati con un sistema Arduino. Se necessario, posso acquistare un bridge già pronto per un prezzo ragionevole fino a $ 30
Idealmente questo funzionerebbe sia con i laser rossi che con quelli verdi, ma le lunghezze d'onda sono così diverse che dubito che potrebbe essere fatto e non funzionerebbe attraverso l'intero spettro della luce.
Inizialmente, vorrei impostare il livello di questo raggio attaccato ai motori con i pulsanti su-giù. Sarei felice se il secondo motore si livellasse con il giroscopio durante l'installazione, ma senza Arduino potrebbe essere molto difficile.
Sento che quello che sto cercando di fare è così semplice che posso farla franca senza usare Arduino. E insisto su un analogico, a causa delle difficili condizioni in un cantiere edile e mi sembra che più elettronica, più inaffidabile è il dispositivo.
Funzionerà solo al chiuso e la distanza del laser è di max 10 m. Il motore che ho trovato all'inizio ha un grande assorbimento di corrente di 200mA max 2.19 A, ma anche una grande coppia.
Alimentazione 18 V CC da una batteria Makita.
Grazie in anticipo per eventuali suggerimenti.
Saluti dalla Polonia
Rafal
Malloppo, festone : Ho una confusione sul funzionamento degli alberi motore. La vite filettata su entrambi i motori spingerà l'utensile, ma non può tirarlo indietro? Come funziona?
È possibile implementare lo stesso con un solo motore?
Sig. Rafal: Le linee di livellamento inferiori sarebbero forse 70 cm, solo per stanze piccole, ad es. una toilette in modo da poter entrare da una porta.
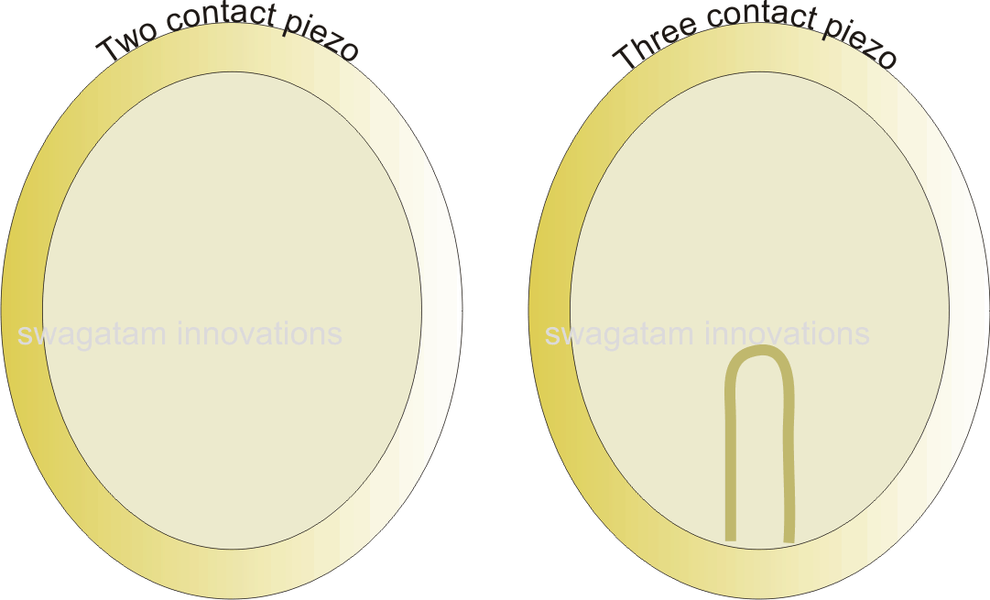
Macchina senza azionamento, tirata a mano, solo livellanti. Nel video, i due oggetti gialli sugli alberi sono rilevatori laser fissati rigidamente ai bordi.
Il laser si trova da qualche parte più lontano e produce una linea orizzontale.
I motori sarebbero attaccati a un carrello e la vite filettata per livellare i bordi con rilevatori laser. Devono esserci due motori per livellare entrambi i lati, ma è un'immagine speculare.
L'unica parte comune sarebbe un ponte H a due canali come se lo stessi facendo da un modulo già pronto e possibilmente da un giroscopio, ma è un sogno :).
È importante che siano presenti i pulsanti per i giri motore sinistro e destro.
La procedura è questa. Ad esempio, appendo il laser 2 m sopra il livello del pavimento designato. Misuro 2 metri dal raggio laser al bordo inferiore delle rette.
Regolo l'altezza premendo i pulsanti degli interruttori destra-sinistra in modo che sia pari a 2 metri dal bordo inferiore delle scale. Metto i rivelatori sugli alberi in modo che il raggio laser sia a livello zero tra le sezioni del fotodiodo. E il resto farà da solo
In allegato ho messo un disegno del funzionamento del rivelatore.
Rafal
Progettazione di circuiti

Guardando la figura sopra, saranno necessari due di tali stadi circuitali identici per rilevare e correggere l'utensile controllato da motore associato rispetto alla precisione di rettilineità della linea laser.
Le due fasi identiche sono immagini speculari l'una dell'altra come mostrato di seguito:

Il circuito è abbastanza semplice. Funziona con un comparatore a finestra che garantisce che i motori di azionamento non siano operativi fintanto che la coppia di LDR è esposta con la stessa luminosità della linea laser.
Viene quindi generata una metà della tensione di alimentazione sull'ingresso non invertente di A1 e sull'ingresso invertente di A2.
Non appena viene rilevata una deflessione nella linea laser (cosa che può verificarsi se l'utensile controllato dal motore non è allineato diritto), la luminosità che influisce sugli LDR R1 e R2 cambia.
In questa situazione, la tensione di ingresso al comparatore a finestra si allontana dalla metà della tensione di alimentazione. Questa situazione fa sì che l'uscita del comparatore comanda alla rete del ponte motore di muovere il motore in senso orario o antiorario.
Transistor T1. . . I T4 sono configurati come una rete bridge per abilitare l'accensione del motore avanti e indietro a seconda dell'illuminazione LDR o dell'angolo di deviazione della linea laser.
Diodi D1. . . D4 sono posizionati per annullare i picchi di tensione generati durante il tempo in cui il motore è attivo e in funzione. La funzione dei potenziometri Preset P1 e P2 è quella di facilitare le regolazioni dell'allineamento.
Questi sono messi a punto per garantire che il motore sia completamente spento e inattivo fintanto che la relativa coppia di LDR è esposta alla stessa identica luminosità della luce laser.
Diciamo ad esempio, a causa di un allineamento errato dell'utensile controllato dal motore, l'inclinazione della linea laser fa sì che la luce si riduca su LDR R2 rispetto a LDR R1. Ciò farà sì che la tensione nel punto A superi la metà della tensione di alimentazione.
In questa situazione, l'uscita dell'amplificatore operazionale A1 diventa alta, costringendo i transistor T1 e T4 a funzionare. Questo a sua volta fa ruotare il motore nella relativa direzione. Questa azione sposta automaticamente l'utensile collegato in linea retta finché la sua precisione di allineamento orizzontale non coincide con la precisione della linea laser.
Viceversa, se assumiamo che l'utensile sia inclinato con l'orientamento opposto in modo tale che l'illuminazione degli LDR sia opposta a quella discussa sopra, fa sì che la tensione nel punto A scenda al di sotto della metà della tensione di alimentazione. Questa condizione attiva l'amplificatore operazionale di uscita A2 in modo che T3 e T2 diventino operativi.
Ne risulta che il motore ora gira nella direzione opposta, nel tentativo di correggere l'allineamento dell'utensile nella relativa direzione fino a renderlo perfettamente rettilineo coincidente con la precisione orizzontale della linea laser.
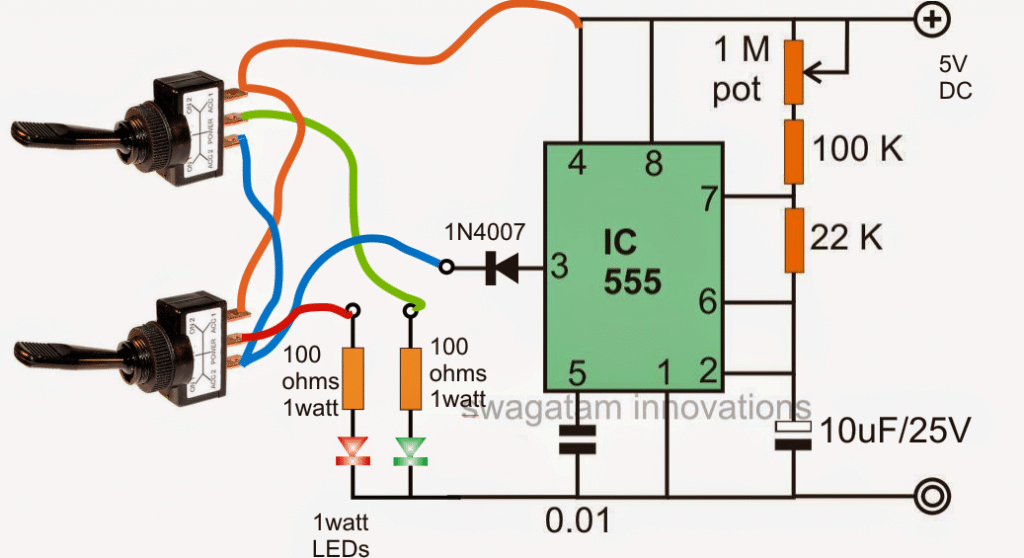
Pulsante su / giù
I pulsanti su giù per la preimpostazione iniziale dell'altezza della livella a bolla possono essere implementati semplicemente cablando interruttori a pulsante in parallelo a ciascuno degli LDR.
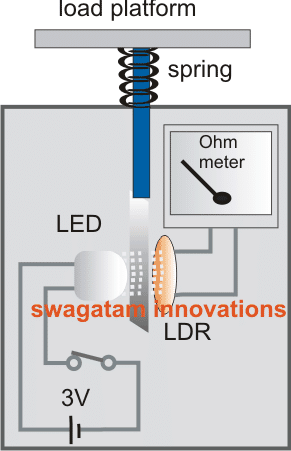
Installazione LDR
Per ottenere la risposta corretta dagli LDR, le coppie di sinistra destra devono essere installate all'interno di un involucro simile a un tubo in modo tale che siano in grado di 'vedere' solo l'illuminazione laser e non qualsiasi altra luce ambientale.
L'idea può essere testimoniata nella seguente immagine:

Qui, possiamo vedere che gli LDR sono posizionati molto vicini l'uno all'altro, il che garantisce che quando la linea laser si trova al centro esatto, una parte di entrambe le coppie di LDR viene illuminata dalla luce laser in modo uniforme.
La parte anteriore della custodia LDR potrebbe essere coperta con una lente diffusa, in modo che l'illuminazione laser possa essere diffusa uniformemente all'interno sui rispettivi LDR.
Precedente: Semplice circuito di allarme antifurto per proteggere oggetti preziosi Avanti: Circuito tester universale BJT, JFET, MOSFET