In parole semplici, il servomotore è un individuo motore elettrico . Lo scopo principale dell'utilizzo di questo motore nelle industrie è quello di ruotare e spingere le parti della macchina in cui devono essere definiti i compiti. Questo è uno dei motori più ampiamente utilizzati in applicazioni come la produzione industriale, lo sviluppo dell'automazione, ecc. Anche se questi sono proposti e pianificati per essere utilizzati in applicazioni come controllo del movimento per un posizionamento di alta precisione, inversione rapida e prestazioni eccezionali. Il applicazioni dei servomotori includere nella robotica, sistemi automatizzati industrializzati, sistemi radar, sistemi di tracciamento, apparati macchina, computer, macchine CNC, ecc. Questo articolo discute una panoramica di cosa sia un servomotore e diversi tipi di servomotori
Cos'è un servomotore?
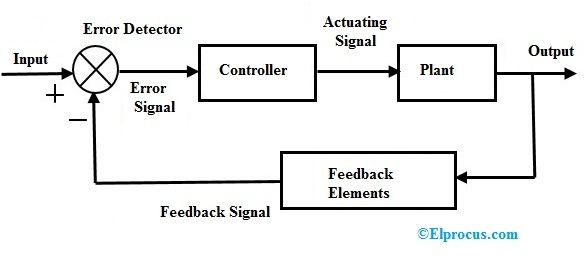
Un altro nome del servomotore è motore controllato, perché questi sono impiegati nel feedback sistemi di controllo come gli attuatori di uscita e non utilizza per la continua alterazione dell'energia. Il principio di funzionamento del servomotore e il motore elettromagnetico sono gli stessi tranne che la struttura e la funzione sono dissimili. La potenza nominale di questi motori cambierà da un watt a poche centinaia di watt.

Servomotore
Quando l'inattività del rotore nel motore è piccola, la risposta sarà alta. Allo stesso modo, il rotore del servomotore è alto, quindi il motore ha un diametro minore. Funzionano a una velocità inferiore o a velocità zero a volte. I servomotori sono applicabili a radar, macchine utensili, computer, robot, monitoraggio, controllo dell'elaborazione, sistemi di guida, ecc. Fare riferimento al collegamento per saperne di più Servomotore: funzionamento, vantaggi e svantaggi
Diversi tipi di servomotori
Generalmente, questi motori sono classificati in due tipi in base all'alimentazione utilizzata per la sua funzione come Servomotori AC & Servomotori DC . Questi motori sono adatti per molte applicazioni a causa del progresso di il microprocessore , transistor di potenza e controllo ad alta precisione. Questi motori includono alimentazione a tre fili, messa a terra e controllo. In base alle dimensioni e al profilo, questi motori vengono utilizzati in varie applicazioni. Il servomotore più utilizzato è il servomotore RC che viene utilizzato principalmente nelle applicazioni hobbistiche. Le caratteristiche principali di questo motore includono convenienza, semplicità e coerenza.

Tipi di servomotori
Servomotore DC
Generalmente, il servomotore CC include una sorgente CC separatamente nel campo dell'avvolgimento dell'indotto. Il motore può essere comandato gestendo la corrente di campo oppure la corrente di armatura. Il controllo dell'armatura presenta alcuni vantaggi rispetto al controllo sul campo. Allo stesso modo, il controllo sul campo ha ottenuto vantaggi rispetto al controllo dell'armatura. Il controllo di questo motore può essere effettuato in base all'applicazione utilizzata. Questo motore offre una risposta rapida e precisa ai segnali di comando di inizio o fine a causa della piccola reattanza induttiva dell'armatura. Questi motori sono utilizzati in diversi dispositivi e apparecchiature a controllo numerico.
Tipi di servomotori CC
I servomotori CC sono classificati in diversi tipi che sono
- Motori di serie
- Motori serie split
- Shunt Control Motor
- Motore di derivazione a magneti permanenti

Servomotori DC
Motori di serie
I servomotori CC di tipo serie includono una coppia di avviamento elevata e assorbono un'enorme corrente. La regolazione della velocità di questo motore è molto inferiore. Il turnaround può essere ottenuto capovolgendo la polarità della tensione di campo utilizzando l'avvolgimento di campo in serie divisa. L'efficienza di questo motore può essere ridotta utilizzando questo metodo.
Motori serie split
Questi tipi di motori sono i motori della serie DC con pochi kilowatt parziali e tarati con il campo split. Questi motori possono funzionare come motori controllati in campo individualmente eccitati. L'armatura del motore può essere fornita con un'alimentazione di corrente stabile. Questo motore ha una curva comune con la velocità di coppia. Ciò specifica un'elevata coppia di stallo e un rapido calo della coppia amplificando la velocità. Ciò si tradurrà in uno smorzamento eccellente.
Shunt Control Motor
Il servomotore di controllo shunt non è dissimile da nessun tipo di motore shunt DC. Questo motore include due avvolgimenti come avvolgimenti di campo e avvolgimenti di armatura. Gli avvolgimenti di campo si trovano sullo statore della macchina mentre gli avvolgimenti dell'indotto si trovano sul rotore. Il collegamento tra questi due avvolgimenti può essere effettuato a una sorgente CC. In un motore di derivazione CC, i due avvolgimenti sono collegati in parallelo alla sorgente CC.
Motore di derivazione a magneti permanenti
Questo è un motore ad eccitazione permanente ovunque il campo sia infatti alimentato da un magnete stabile. Le prestazioni del motore sono le stesse del motore a campo permanente controllato dall'armatura che riconosceremo nel segmento successivo.
Servomotore AC
Il servomotore AC include un codificatore che viene utilizzato dai controller per fornire il feedback e il controllo ad anello chiuso. Il motore CA può essere posizionato con un'elevata precisione e controllato in modo accurato secondo necessità per le applicazioni. Questi motori hanno design superiori per ottenere una coppia migliore. Il Applicazioni per servomotori AC includono principalmente nella robotica, automazione , Apparecchiature CNC e molte altre applicazioni.
Tipi di servomotori AC
I servomotori AC sono classificati in diversi tipi che sono
- Servomotore di rotazione posizionale
- Servomotore a rotazione continua
- Servomotore lineare

Servomotori AC
Servomotore di rotazione posizionale
Il tipo più comune di servomotore è il motore a rotazione posizionale. L'uscita dell'albero nel motore ruota di 180 gradi. Questo tipo di motore comprende principalmente arresti fisici che sono posizionati nel meccanismo a ingranaggi per impedire la rotazione all'esterno per proteggere il sensore di rotazione. Le applicazioni del servomotore a rotazione posizionale includono in robot , aerei, giocattoli, auto controllate e molte altre applicazioni.
Servomotore a rotazione continua
Sia il servomotore a rotazione posizionale comune che il servomotore a rotazione continua sono uguali, tranne per il fatto che può andare in ogni direzione senza un limite fisso. Il segnale di controllo individua alternativamente il punto statico del servo per comprendere la direzione e la velocità di rotazione. La varietà di potenziali comandi farà ruotare il motore in senso orario altrimenti antiorario a scelta alterando la velocità, in base al segnale di comando. L'applicazione del servomotore a rotazione continua include una parabola radar. Ad esempio, se viaggi da solo un robot altrimenti puoi utilizzarne uno come un motore di azionamento su un robot mobile.
Servomotore lineare
Il lineare servomotore è un tipo di motore ed è simile al servomotore di rotazione posizionale, tuttavia con meccanismi extra per cambiare l'uscita da circolare nella direzione di avanti e indietro. Non riusciamo a trovare facilmente questi motori, anche se occasionalmente puoi trovarli nei negozi di hobbisti ovunque siano usati come attuatori all'interno di aeromodelli avanzati.
Quindi, si tratta di tipi di servomotori. Questo motore è una divisione del servomeccanismo ed è accoppiato con un qualche tipo di encoder per fornire posizionamento, retroazione della velocità e alcuni apparecchi di correzione dei guasti che attivano il segnale di alimentazione. Le caratteristiche di base da richiedere per qualsiasi servomotore includono, la coppia di uscita del motore deve essere proporzionale alla tensione applicata. La direzione della coppia che viene espansa dal motore deve essere dipendente dalla polarità istantanea della tensione di controllo. Ecco una domanda per te, quali sono le applicazioni del servomotore?